Les ptérosaures sont l’un des rares groupes de vertébrés ayant développé le vol battu. L’une des contraintes les plus importantes de ce type de vol est le décollage. En effet, il s’agit de l’action la plus coûteuse en énergie car elle doit permettre la génération d’une hauteur suffisante pour permettre le battement des ailes et une vitesse suffisante pour rester en l’air. C’est pour étudier cette contrainte chez les ptérosaures, les premiers vertébrés connus à réaliser un vol motorisé mais aussi le clade contenant les plus grands vertébrés volants, que Griffin et ses collègues ont réalisé une étude biomécanique sur un spécimen (SMNK PAL 1133) d’Anhanguera robustus de 5 mètres d’envergure, un anhangueridé du crétacé inférieur du Brésil.

Il existe un débat sur le mode de décollage des ptérosaures : la première hypothèse est un décollage bipède à la manière des oiseaux avec la seule addition d’une transition d’une position de base quadrupède à la pose de lancement bipède (car rappelons le, les ptérosaures sont des quadrupèdes au sol). La seconde hypothèse privilégie un lancement directement quadrupède, qui permettrait d’employer plus de muscles et donc de force au décollage. En effet, les paléontologues se divisent sur la question de savoir si les ptérosaures géants (plus de 9 mètres d’envergure) pouvaient voler car faire s’envoler une telle masse serait impossible selon le modèle de décollage des oiseaux. Un décollage quadrupède permettrait de contourner les contraintes de taille que connait le décollage bipède des oiseaux.
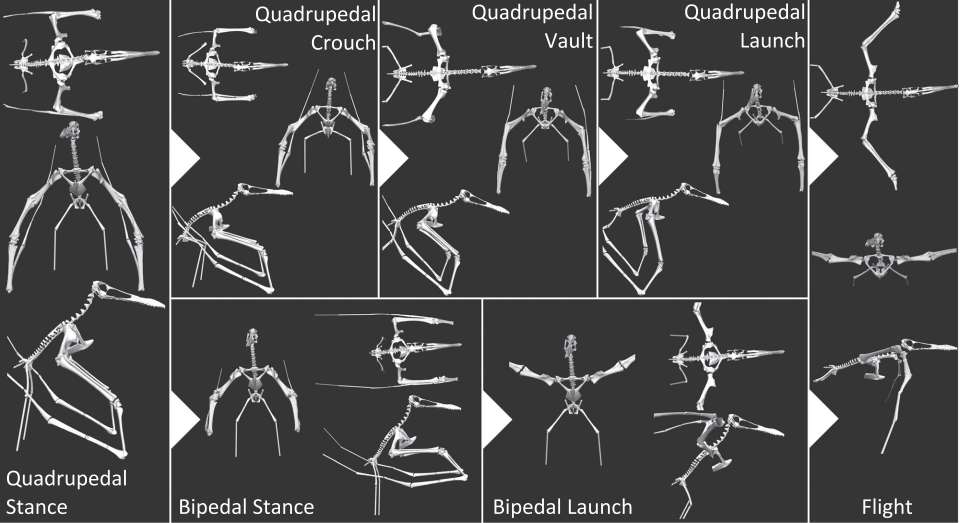
Il faut savoir que notre compréhension de la biomécanique de ces deux hypothèses de lancement est limitée. Il existe de nombreux sites d’empreintes de ptérosaures montrant des scènes de locomotion terrestre, de natation ou encore d’atterrissages mais aucun présentant un décollage. Pour compenser ce manque de preuves, étudier le décollage des ptérosaures nécessite une étude de l’amplitude des mouvements (range of motion en anglais = ROM). Toutefois ces études nécessitent des spécimens bien articulés avec une bonne connaissance des points de dislocation des os, ce qui est très rare chez les ptérosaures. C’est pour pallier à ce manque que Griffin et ses collègues ont mis au point une technique d’analyse de ROM avec la technologie 3D. Ce modèle permet de tester le ROM des hanches et des épaules y compris avec l’ajout de tissus mous comme le cartilage, les ligaments ou les muscles.
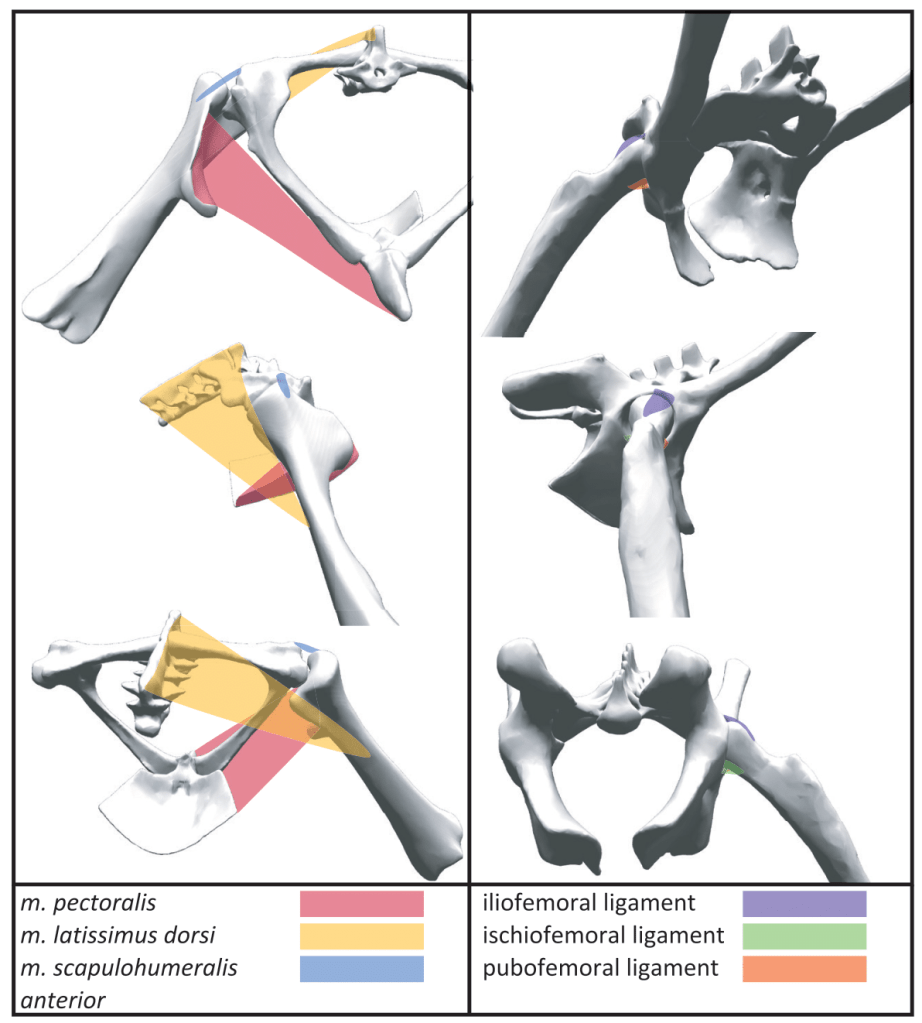
Cette analyse a pu rendre un verdict assez intéressant : en supposant que les muscles des ptérosaures pouvaient s’étirer comme ceux des oiseaux et que leur cartilage avait une épaisseur semblable à celle des crocodiles, ils auraient pu décoller en adoptant une posture bipède comme quadrupède. Toutefois, le modèle de Griffin et ses collègues a mis en évidence le fait que le modèle bipède n’était pas viable lorsque la taille des ligaments supposée est courte alors que le modèle quadrupède reste viable. Ainsi la viabilité du modèle bipède dépend de la taille des ligaments, une donnée invérifiable d’après nos connaissances actuelles, tandis que la posture quadrupède est entièrement viable.
Référence : Griffin, B.; Martin-Silverstone, E.; Demuth, O.; Pêgas, R.; Palmer, C.; Rayfield, E., 2022, Constraining pterosaur launch: range of motion in the pectoral and pelvic girdles of a medium-sized ornithocheiraean pterosaur. Biological Journal of the Linnean Society. blac063.
Toutes les images proviennent de Griffin et al., 2022 à l’exception de la première qui est une œuvre de John Conway
